以下用圖片方式表達
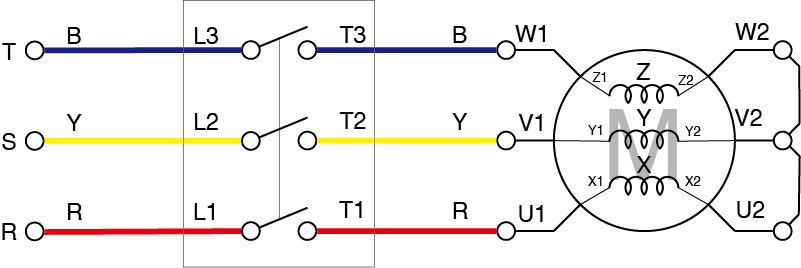
RST = Reference, Secondary, Tertiary
RYB = Red, Yellow, Blue
L1 L2 L3 = Line1, Line2, Line3
T1 T2 T3 = Terminal1, Terminal2 Terminal 3
UVW = Motor Lead
XYZ = Motor Coil Name
希望我整理正確
Andrew Choi 蔡健發 (清心明月), 不務正業的行街
My Notebook
以下用圖片方式表達
RST = Reference, Secondary, Tertiary
RYB = Red, Yellow, Blue
L1 L2 L3 = Line1, Line2, Line3
T1 T2 T3 = Terminal1, Terminal2 Terminal 3
UVW = Motor Lead
XYZ = Motor Coil Name
希望我整理正確
原文:http://users.cecs.anu.edu.au/~luke/xr4000batbal.html
Nomad XR4000 battery balancing circuit
The nomad XR 4000 robot has four lead acid batteries in series. The problem is that even with batteries from an identical batch, minute differences between the batteries makes them charge unevenly.
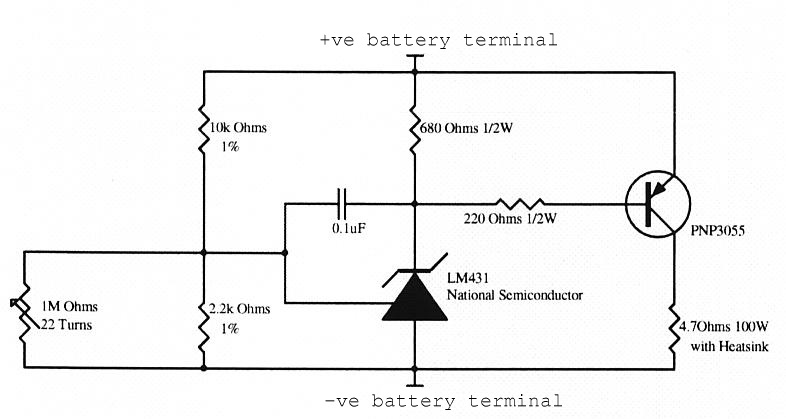
To combat this problem we made the following battery balancing circuit.
The problem is that batteries that are charged has a potential of over 13.8 volts, while other batteries have potentials of only 10 volts and don’t get charged. One circuit is placed in parallel with each of the batteries.
If the potential across the battery is lower than 13.8 volts, the circuit does nothing, if the potential raises above 13.8 the transistor starts to switch on placing the resistor in parallel with the battery until the potential is pulled down to 13.8. You can think of it as a glorified zener diode, with a lot sharper on elbow on the voltage vs current curve, the LM431 is a tunable zener diode. A potentiometer allows you to set the ~13.8 volt on/off point for the circuit. We set the pot. using a variable workshop supply to just start to turn on at 13.8 volts (you’ll see the current drawn go way up when it does).
Nomad XR4000 電池均衡電路
Nomad XR 4000 機器人採用了四個串聯的鉛酸電池。問題是,即使是來自相同批次的電池,微小的差異也會導致它們充電不均勻。
為了解決這個問題,我們設計了以下的電池均衡電路。
問題在於已經充電的電池電位超過了13.8伏特,而其他電池的電位只有10伏特,無法充電。我們將一個電路放置在每個電池的並聯位置。
如果電池上的電位低於13.8伏特,該電路將不起作用;如果電位升至13.8伏特以上,晶體管開始開啟,將電阻與電池並聯,直到電位降至13.8伏特。您可以將其視為一種高級齊納二極管,具有更陡的電壓與電流曲線彎曲點,LM431是可調的齊納二極管。一個電位計允許您設定電路的約13.8伏特的開/關點。我們使用可變的工作室電源設置電位計,以在13.8伏特時開始啟動(當它啟動時,您將看到電流大幅上升)。
Because of the potential worst case scenarios for the system the resistor and transistor have to be rated quite highly. In reality though the resistor and transistor rarely get warm.
由於系統的潛在最壞情況,電阻器和晶體管必須有相當高的額定值。然而實際上,電阻器和晶體管很少會變熱。
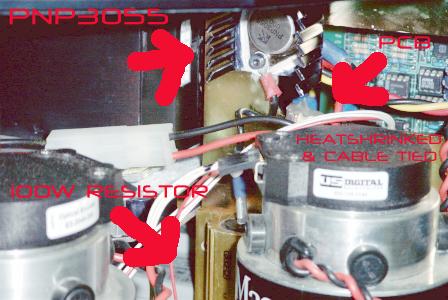
The circuit has been in the robot for over two years and the batteries have not had to be replaced or charged on separate chargers since.
這個電路已經在機器人中使用了兩年多,而且自那時以來電池不需要更換,也不需要單獨充電器充電。”
